Arctos 6-Axis Robotic Arm
Arduino
ROS2
3D Printing
Robotics
Project Management
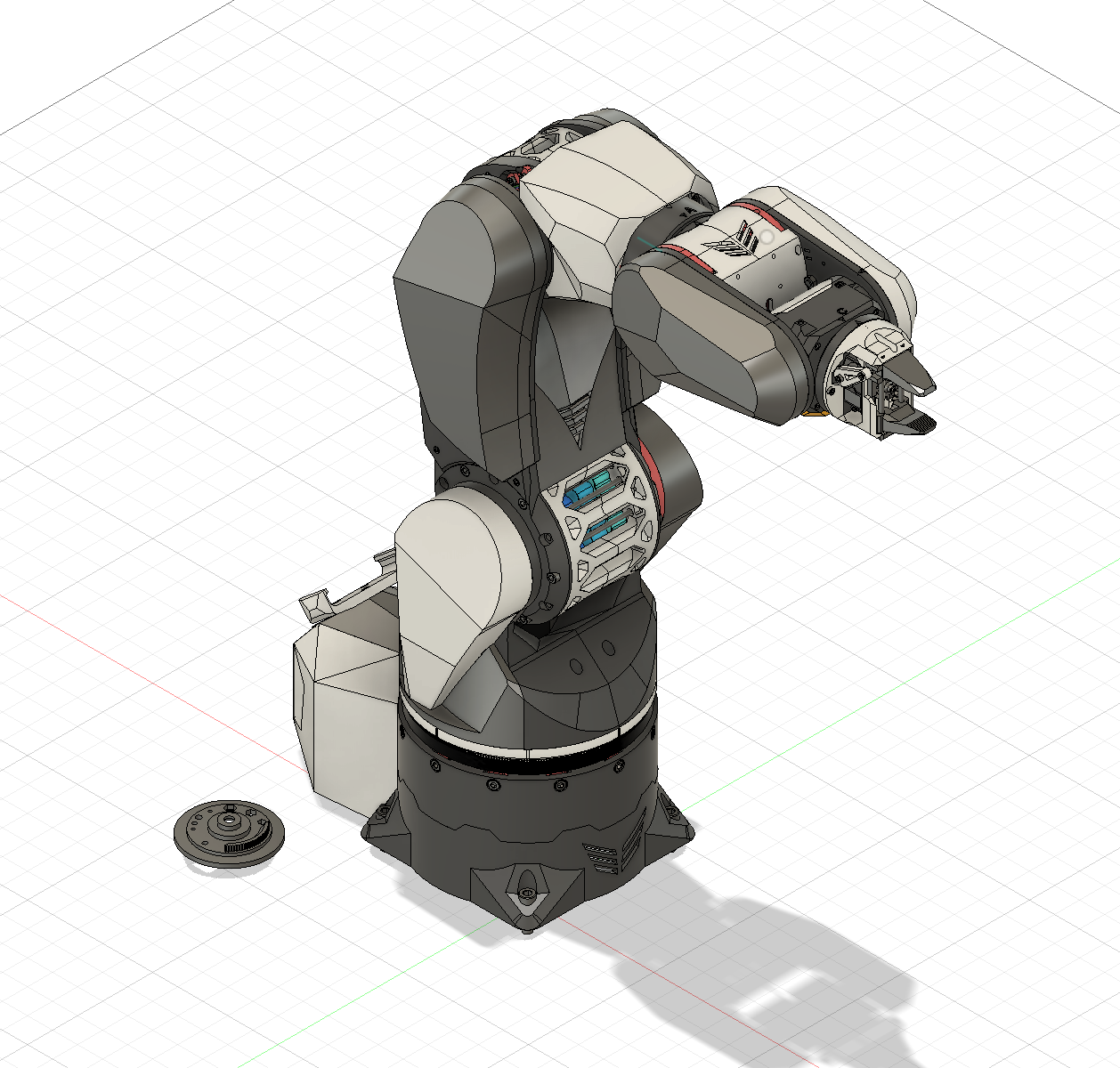
Leading project management for a team of 7 members to build a 600mm tall robotic arm with 3D printed parts and custom end effector. Programming Arduino Mega with Arctos Studio/ROS2 to interface with sensors, motors, and control electronics.
Overview
The Arctos 6-Axis Robotic Arm is a sophisticated engineering project focused on high-precision motion control and mechanical design.
As the project lead, I coordinated a multidisciplinary team of 7 members to design, 3D print, and assemble a 600mm tall robotic arm.
Key challenges included:
- Optimizing 3D printed structural integrity for payload capacity.
- Implementing inverse kinematics for smooth movement.
- Integrating ROS2 for advanced control and simulation.
The arm features custom-designed end effectors and is powered by an Arduino Mega interfacing with various sensors and stepper motors.
Key Specifications
Category
Arduino
Role
Lead Developer